Control synthesis
Overview
LPVcore contains state-of-the-art analysis and controller synthesis algorithms for several model structures. On this page, a brief overview is given of the functionality available to perform analysis and controller synthesis. Firstly, an overview of the available analysis methods is provided. Secondly, the available algorithms for controller synthesis are presented. Finally, a short description of the algorithms that are used to solve the analysis and controller synthesis problems is given.
Analysis
General information
Through the lpvnorm function, several methods are available to analyze the performance (and stability) of LPV systems. The supported LPV representations are LPVcore.lpvss and LPVcore.lpvidss objects with an affine scheduling-dependency, i.e., of the form
where is the state of the model, its input, and its output, in continuous-time and in discrete-time. Moreover, , , , and are matrix functions of the form . Furthermore, grid-based LPV representations as LPVcore.lpvgridss objects are also supported by lpvnorm.
In the following table, an overview of the available performance metrics that can be analyzed is given. The corresponding type option for the lpvnorm command for each performance metric is also indicated. By default, if type is not specified, l2 is used.
| Performance metric | IO relation* | Command |
|---|---|---|
| Induced -gain | lpvnorm(sys,'l2') | |
| Induced -gain | lpvnorm(sys,'linf') | |
| Generalized norm | lpvnorm(sys,'h2') | |
| Passivity | lpvnorm(sys,'passive') |
*'' denotes the signal norm, see Definition 2.8 in [1] for more details.
The following code snippet shows how the induced -gain of an LPV model can be computed:
p = preal('p', 'ct', 'Range', [0, 9]);
A = [0 1; - 1 - p, -3];
B = [0;1];
C = [1 0];
D = 0;
model = LPVcore.lpvss(A, B, C, D);
gam = lpvnorm(model, 'l2');
See synthesis/example_lpvnorm.m for more detailed examples.
Analysis options
Several options are available for lpvnorm. Namely, the following name-value pairs are available:
SolverOptions: A structure containing the YALMIP solver settings. See alsohelp sdpsettings. Default value:sdpsettings('verbose',0,'solver','sdpt3').NumericalAccuracy: An option to set the numerical accuracy parameter. A positive number that is used to ensure that the solved LMIs are negative or positive definite by enforcing that or , respectively, where is the value of the numerical accuracy parameter. Default value:1e-10.LinfOptions: A structure containing the options for based analysis. It needs to be constructed by using thelinfOptionscommand. See below for more details. Default value:linfOptions().ParameterVaryingStorage: An option to indicate whether a parameter-varying storage function is considered (if at least one of the scheduling-variables has finite rate-bounds). Use0to indicate using a parameter-independent storage function,1to indicate parameter-dependency on all parameters with finite rate-bounds. ForLPVcore.lpvgridssmodels, the user must specify a 'template storage function' in order to use a parameter-varying storage function. This template storage function is used in order to specify the parameter dependency of the used parameter-varying storage function. For example:p = preal('p', 'ct', 'RateBound', [-1 1]'); stor = 1 + p + p^2; lpvnorm(sys, 'l2', 'ParameterVaryingStorage', stor) All the used parameters of the template storage function should have their rate bounds specified and their names should match the parameter names of the considered
LPVcore.lpvgridssmodel. In continuous-time, the template storage function can only have a polynomial dependency, i.e., custom basis function throughpbcustomcannot be used. Default value:1(forLPVcore.lpvssmodels), 0 (forLPVcore.lpvgridssmodels).Verbose: Option to turn progress messages on,1, or off,0. Default value:1.
The options can be used by adding them as input arguments to the lpvnorm command, for example:
gam = lpvnorm(model, 'l2', 'Verbose', 0, 'NumericalAccuaracy', 1e-8);
or
gam = lpvnorm(model, 'l2', Verbose = 0, NumericalAccuaracy = 1e-8);
Controller synthesis
Output Feedback Synthesis
General information
The lpvsyn command allows the user to synthesize various optimal (output-feedback) LPV state-space controllers for a given state-space LPV (generalized) plant . Like for analysis, the lpvsyn command supports LPVcore.lpvss and LPVcore.lpvidss objects with an affine scheduling dependency, as well as LPVcore.lpvgridss objects.
It is assumed that the plant is of the form
where is the state of the model, its control input, its measured output, is the (generalized) disturbance channel, and is the (generalized) performance channel.
For controller synthesis for affine LPVcore.lpvss and LPVcore.lpvidss objects, it is assumed that and are constant matrices.
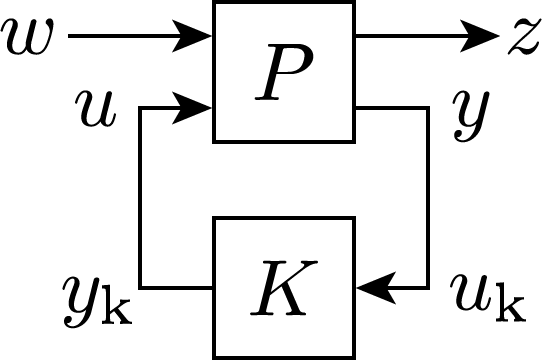
The synthesized controller resulting from running lpvsyn is of the form
which is connected to as in the following figure:
By default, for the closed-loop of and , the -gain from to is minimized to synthesize . The considered performance metric can be adjusted by changing the Performance option through lpvsynOptions or by using one of the performance-specific synthesis functions, i.e., lpvl2syn, lpvlinfsyn, lpvh2syn, or lpvpassyn. The available performance metrics are given in the table below.
| Performance metric | IO relation* | Command |
|---|---|---|
| Induced -gain | Setting lpvsynOptions('Performance,'l2') for lpvsyn or using lpvl2syn | |
| Induced -gain | Setting lpvsynOptions('Performance,'linf') for lpvsyn or using lpvlinfsyn | |
| Generalized norm | Setting lpvsynOptions('Performance,'h2') for lpvsyn or using lpvh2syn | |
| Passivity | Setting lpvsynOptions('Performance,'passive') for lpvsyn or using lpvpasssyn |
The following code snippet shows how an -gain optimal LPV controller can be synthesized for a plant :
p = preal('p', 'ct', 'Range', [0, 9]);
A = [0 1; - 1 - p, -3];
B = [0 0;0 1];
C = [-1 0;-1 0];
D = [1 0;1 0];
P = LPVcore.lpvss(A, B, C, D);
ny = 1;
nu = 1;
[K, gam] = lpvsyn(P, ny, nu);
See synthesis/example_lpvsyn.m for more detailed examples.
Synthesis options
Various options related to controller synthesis can be set using the lpvsynOptions function. The following options, specified as name-value pairs, are available:
Backoff: The factor which is used to back off from the optimal gain that is found (to , where is theBackoffvalue) in order to reduce numerical errors, since the true optimal solution is often close to singular. Default value:1.01.Dependency: A logical array (1x4or4x1) which indicates which controller matrices, corresponding to , , and -matrix, should have parameter-dependency. In case of thetransformationmethod, these apply to the transformed controller matrices, i.e., , , , and in Section 2.5.3. in [1] or similarly , , , and in Section 4.2.2. in [5]. Default value:[1 1 1 1].DirectFeedthrough: An option to indicate if the synthesized controller should have direct feedthrough1or not0, i.e., if the controller has a -matrix or not. Default value:1.ImproveConditioning: An option to indicate if extra optimization problems are solved to improve the conditioning of the found solutions. Default value:1.LinfOptions: An option to set the options for -based controller synthesis. Needs to be constructed by using thelinfOptionscommand. See below for more details. Default value:linfOptions().Method: An option to indicate what method to use internally to solve the controller synthesis problem. Possible values aretransformationandprojection. Usingtransformation, a nonlinear transformation is applied to the unknown variables (such as the controller matrices) in order to construct the LMIs for controller synthesis. The optimization problem is solved in these new variables, which are then used to compute the controller state-space matrices , , , and through the nonlinear transformation. Usingprojection, the controller state-space matrices are 'projected' away from the LMIs. Then, the optimization problem is solved for these LMIs which do not contain the controller state-space matrices. Then, an extra LMI is solved, corresponding to the closed-loop system containing the controller state-space matrices as unknowns, in order to obtain the controller state-space matrices. Thetransformationmethod often gives better numerical results. However, for continuous-time systems, only theprojectionmethod allows for controller synthesis with a parameter-varying storage function. Default value:transformation.NumericalAccuracy: An option to set the numerical accuracy parameter. A positive number that is used to ensure that the solved LMIs are negative or positive definite by enforcing that or , respectively, where is the value of the numerical accuracy parameter. Default value:1e-8.ParameterVaryingStorage: An option to indicate whether a parameter-varying storage function is considered (if at least one of the scheduling-variables has finite rate-bounds). Use0to indicate using a parameter-independent storage function,1to indicate parameter-dependency on all parameters with finite rate-bounds, or set to[]to letlpvsyndecide if an parameter-varying storage function can be used or not. Similar as forlpvnorm, forLPVcore.lpvgridssmodels the user must specify a 'template storage function' in order to use a parameter-varying storage function. This template storage function is used in order to specify the parameter dependency of the used parameter-varying storage function. For example:p = preal('p', 'ct', 'RateBound', [-1 1]'); stor = 1 + p + p^2; lpvnorm(sys, 'l2', 'ParameterVaryingStorage', stor) All the used parameters of the template storage function should have their rate bounds specified and their names should match the parameter names of the considered
LPVcore.lpvgridssmodel. In continuous-time, the template storage function can only have a polynomial dependency, i.e., custom basis function throughpbcustomcannot be used. Default value:[](forLPVcore.lpvssmodels), 0 (forLPVcore.lpvgridssmodels).ParameterVaryingStorageOption: This options allows the user to choose between two different parameter-varying storage parameterizations. More specifically, this allows the user to either synthesize a controller corresponding third (by setting this option to1) or fourth row (by setting this option to2) in Table I in [3]. Neither option is in general better and which option will achieve better performance will depend on the specific control problem (and plant) that is considered. This option is currently only available for continuous-time controller synthesis problems. Default value:1.Performance: An option to set the performance metric that is considered for controller synthesis. Possible values are:'linf','l2','h2', and'passive'. Default value:'l2'.PoleConstraint: An option to set constraints on the closed-loop eigenvalues for controller synthesis. It needs to be constructed using thepoleConstraintOptionscommand. See below for more details. Default value:poleConstraintOptions().SolverOptions: A structure containing the YALMIP solver settings. See alsohelp sdpsettings. Default value:sdpsettings('verbose', 0, 'solver', 'sdpt3').Verbose: An option to turn progress messages on,1, or off,0. Default value:1.
Usage example:
synOptions = lpvsynOptions('Backoff', 1.1, 'Performance', 'linf');
or
synOptions = lpvsynOptions(Backoff = 1.1, Performance = 'linf');
The synOptions variable can then be used with lpvsyn as follows:
K = lpvsyn(sys, ny, nu, synOptions);
State-feedback synthesis
General information
The lpvsynsf command allows the user to synthesize state-feedback LPV controllers for a state-space LPV (generalized) plant . Similar to output-feedback controller synthesis using lpvsyn, the lpvsynsf command supports LPVcore.lpvss and LPVcore.lpvidss objects with an affine scheduling dependency, as well as LPVcore.lpvgridss objects.
For state-feedback synthesis, it is assumed that the plant is of the form
where again is the state of the model, its control input, is the (generalized) disturbance channel, and is the (generalized) performance channel.
The synthesized controller resulting from running lpvsynsf is of the form
and is given as a parameter-varying matrix object .
By default, the -gain from to is minimized to synthesize . Similarly, as for lpvsyn, the considered performance metric can be adjusted by changing the Performance option through lpvsynsfOptions or by using one of the performance-specific synthesis functions, i.e., lpvl2synsf, lpvlinfsynsf, lpvh2synsf, or lpvpassynsf. The available performance metrics are given in the table below.
| Performance metric | IO relation* | Command |
|---|---|---|
| Induced -gain | Setting lpvsynsfOptions('Performance,'l2') for lpvsynsf or using lpvl2synsf | |
| Induced -gain | Setting lpvsynsfOptions('Performance,'linf') for lpvsynsf or using lpvlinfsynsf | |
| Generalized norm | Setting lpvsynsfOptions('Performance,'h2') for lpvsynsf or using lpvh2synsf | |
| Passivity | Setting lpvsynsfOptions('Performance,'passive') for lpvsynsf or using lpvpasssynsf |
The following code snippet shows how an -gain optimal state-feedback LPV controller can be synthesized for a plant :
p = preal('p', 'ct', 'Range', [0, 9]);
A = [0 1; - 1 - p, -3];
B = [0 0;0 1];
C = [-1 0];
D = [1 0];
P = LPVcore.lpvss(A, B, C, D);
nu = 1;
[K, gam] = lpvsynsf(P, nu);
See synthesis/example_lpvsynsf.m for more detailed examples.
Synthesis options
Various options related to state-feedback controller synthesis can be set using the lpvsynsfOptions function. The majority of the options specified by lpvsynsfOptions are the same as the ones in lpvsynOptions, see above. Next, we will list all options that are available, and we will give a description for the options that differ from the ones of lpvsynOptions.
BackoffDependency: A logical value which indicates if the state-feedback matrix should be parameter-dependent,1, or not,0. Default value:1.ImproveConditioningLinfOptionsNumericalAccuracyParameterVaryingStorageParameterVaryingStorageOptionPerformancePoleConstraintSolverOptionsVerbose
Usage example:
synOptions = lpvsynsfOptions('Backoff', 1.1, 'Performance', 'linf');
or
synOptions = lpvsynsfOptions(Backoff = 1.1, Performance = 'linf');
The synOptions variable can then be used with lpvsynsf as follows:
K = lpvsynsf(sys, nu, synOptions);
General Options
-based analysis and controller synthesis options
Analysis and controller synthesis for performance work by carrying out a line-search over a slack variable in order to compute the minimal -gain that the system satisfies. The line-search works by first optimizing (which corresponds to the -gain) for a fixed number of values for . Afterwards, a bisection-based search algorithm (based on the Golden-ratio) is used between the interval of 's that attain the lowest 's in order to optimize the value of further. In order to adjust the settings related to this procedure, the user can use the linfOptions command. The command allows the user to adjust the following settings by specifying name-value pairs:
AccuracyLambda: Allows specifying the maximum search interval during the bisection-based search. If the interval is smaller than this value, the search is completed. Default value:1e-3.LambdaGrid: Array of values for used for initial line-search. Default value:linspace(1e-8, 5, 15).MaxIterations: Maximum number of iterations for the bisection-based search phase. Default value:25.
Usage example:
linfOpt = linfOptions('AccuracyLambda', 1e-4, 'MaxIterations', 30);
or
linfOpt = linfOptions(AccuracyLambda = 1e-4, MaxIterations = 30);
Pole constraint options
Support for pole constraints is currently only supported for continuous-time controller synthesis.
For controller synthesis, the closed-loop eigenvalues for frozen values of the scheduling-variable can be restricted to lie in a certain region in the complex plane. These constraints can be specified through the poleConstraintOptions command. Several regions can be specified as name-value pairs through the command. The options that are available are given in the table below. Specifying multiple constraint regions results in the intersection of these regions being taken as a constraint.
| Name | Description | Inequality | Figure |
|---|---|---|---|
Circle | Constraint eigenvalues to an open circle with radius | with | 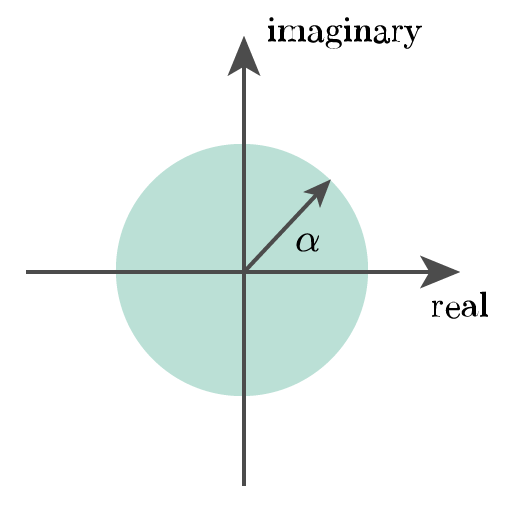 |
LeftHalfPlane | Constraint eigenvalues to lie in the open left half-plane | with |  |
RightHalfPlane | Constraint eigenvalues to lie in the open right half-plane | with |  |
Sector | Constraint eigenvalues to a sector in the left half-plane with an angle of [rad] | with |  |
Custom | A custom region specified by a structure with the fields Q, S, T, and U. | where and |
Usage example:
poleOpt = poleConstraintOptions('Circle',2,'Custom',struct('Q', -3, 'S', 1, 'T', 0, 'U', 1));
or
poleOpt = poleConstraintOptions(Circle = 2, Custom = struct('Q', -3, 'S', 1, 'T', 0, 'U', 1));
Algorithms
To solve the analysis and controller synthesis problem for LPV models for different performance metrics, the concept of dissipativity is used with a quadratic (parameter-dependent) storage function (also see Section 2.5.2 in [1]). This allows the analysis and controller synthesis problems to be cast as a set of Linear Matrix Inequalities (LMIs), corresponding to a Semidefinite Program (SDP), which can be solved efficiently using various SDP solvers.
The LMIs, along with their derivations, that are solved internally when calling lpvnorm can be found in Corollaries 2.1 to 2.4 in [1]. For output-feedback controller synthesis, when calling lpvsyn, the LMIs can be found in Corollaries 2.5 to 2.8 in [1]. For state-feedback controller synthesis, when calling lpvsynsf, the LMIs can be found in the following document: LPV State-Feedback LMI Derivations (PDF). To efficiently construct the LMIs and allow them to be parsed by various solvers, the YALMIP toolbox for MATLAB is used.
For affine LPV representations, the set of LMIs for the analysis and controller synthesis problems corresponds to the vertices of the convex scheduling set. This corresponds to so-called polytopic LPV methods to solve the problem, see e.g. [2] for more details in the -gain case. To help with the construction of the LMIs for this case, the ROLMIP toolbox for MATLAB is used. For LPVcore.lpvgridss objects, the set of LMIs corresponds to each grid point. This corresponds to so-called grid(ding)-based LPV methods to solve the problem, see e.g. [3]. See also Section II.a and II.c in [4] for more details and references on polytopic and grid(ding)-based LPV methods.
References
[1]: Koelewijn, P.J.W., 'Analysis and Control of Nonlinear Systems with Stability and Performance Guarantees: A Linear Parameter-Varying Approach', PhD Thesis, Electrical Engineering, Eindhoven, 2023.
[2]: Apkarian, P., Gahinet, P., and Becker, G., 'Self-Scheduled Hinf Control of Linear Parameter-Varying Systems: A design example,' Automatica, 1995.
[3]: Apkarian, P., and Adams, R.J., 'Advanced gain-scheduling techniques for uncertain systems,' IEEE Transactions on Automatic Control, 1998.
[4]: Hoffmann, C., and Werner, H., 'A Survey of Linear Parameter-Varying Control Applications Validated by Experiments or High-Fidelity Simulations', IEEE Transaction on Control Systems Technology, 2015.
[5]: Scherer, C. W. and Weiland, S. (Jan. 2015). 'Linear Matrix Inequalities in Control'.